Projects
Research & Robotics
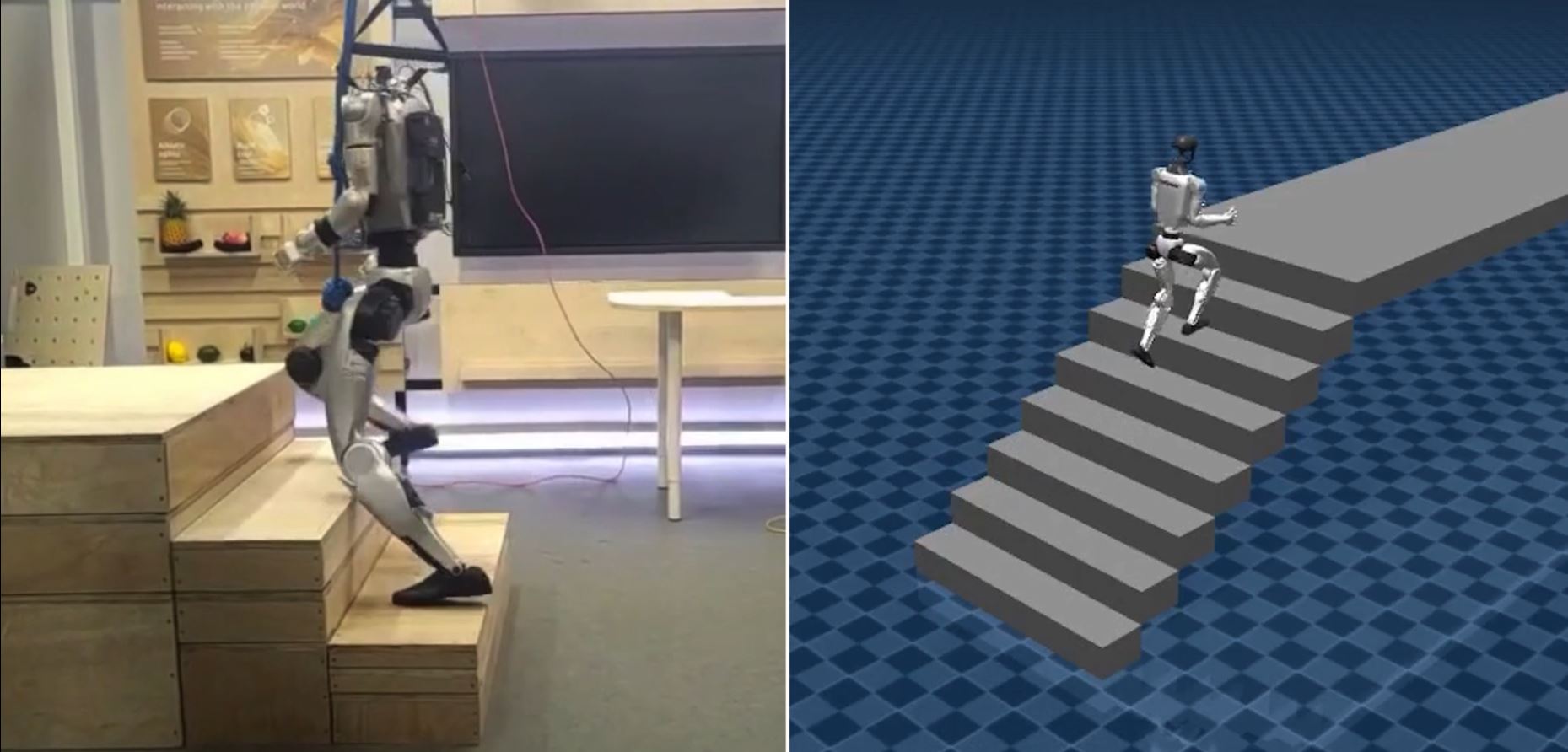
Unitree G1 Locomotion & Stair Climbing
Reinforcement learning pipelines for Unitree G1 humanoid locomotion and stair climbing in MuJoCo and Isaac Sim. Early sim-to-real transfers produced dangerous behaviour caused by incorrect reference frames in the integration code. Wrote ROS nodes to correct all transforms relative to the origins expected by the RL policy. Designed and trained gated locomotion behaviour where the agent only acts when foot targets are within a learned safe region, defaulting to a stable standing posture otherwise. This gating was significantly more complex to train but enabled safe deployment on physical hardware. Extensive domain randomisation further improved robustness outside the training distribution.

VLA Manipulation & Box Picking
Fine-tuned Vision-Language-Action models (GR00T) for context-aware grasping and box picking with Unitree G1 humanoids. Initial training in a low-data regime led to severe overfitting: the model lost recovery behaviours seen earlier in training. Solved this by augmenting data collection with adversarial edge cases, including snatching objects mid-grasp to force recovery and varying backgrounds to prevent visual shortcuts. Achieved 100% box-picking accuracy across final real-world deployed trials. Presented at Mobile World Congress 2026. Following this, recent work has focused on bridging VLAs with RL through IsaacSim environments for complex locomotion tasks.
Agentic AI

SAM-X: Computer Use Agent
Led a team of 10 building a VC-funded computer-use agent combining reinforcement learning with VLM fine-tuning. Designed a hybrid routing architecture where a fast, small model classifies query complexity: simple navigation tasks run on a local model, while complex requests route to a larger VLM hosted on Google Cloud. Used CogVLM as the backbone for its ability to output precise pixel coordinates, and fine-tuned it to respond in a structured format parsed directly into executable actions. Presented the system as a keynote speaker and panellist at Google Clouds internal Agent Workshop.

Hybrid Edge/Cloud Model Routing
Designed a hybrid edge/cloud model routing architecture for Lenovo, optimising inference latency and cost across on-device and cloud endpoints. Built computer vision systems for automated UI testing and evaluating software interaction strategies under realistic constraints. This was one of many workstreams, which varied from software RL environments, to building interaction graphs.
Intelligent Vehicle Design

Intelligent Vehicle Design Module
Designed module content and delivered lectures for the MSc Intelligent Vehicle Design module. Taught Python programming for path planning (hybrid A*) and intelligent control (Q-Learning), with students implementing and evaluating their own agents.
Cybersecurity & Defence

MITRE ATT&CK Automation
Developed software to automate adversary techniques from the MITRE ATT&CK framework, enabling red team security assessments to run standardised attack chains at scale. Separately built voice cryptography systems in C++ and Python for secure communications research.
PhD Research

RL for the DEXTER Robot
Veolia-sponsored research developing reinforcement learning for the DEXTER industrial robot. Worked directly with Veolia engineers to understand their operational constraints: strict safety requirements under stochastic communication delays between local and remote control. Developed model-based RL with world models for sample-efficient control in this setting, neural Lyapunov functions for formal stability verification, and continual reinforcement learning methods to adapt trained controllers to new settings. Created complex local-remote RL environments to simulate realistic deployment conditions.
GeoSnap

GeoSnap
A vision-based localisation, information retrieval and navigation platform. Built the full technical stack from concept to deployment, managing architecture decisions, development, and infrastructure. I presented and secured funding as CTO. It has been used at every University of Surrey open day since October 2024.
Other Projects
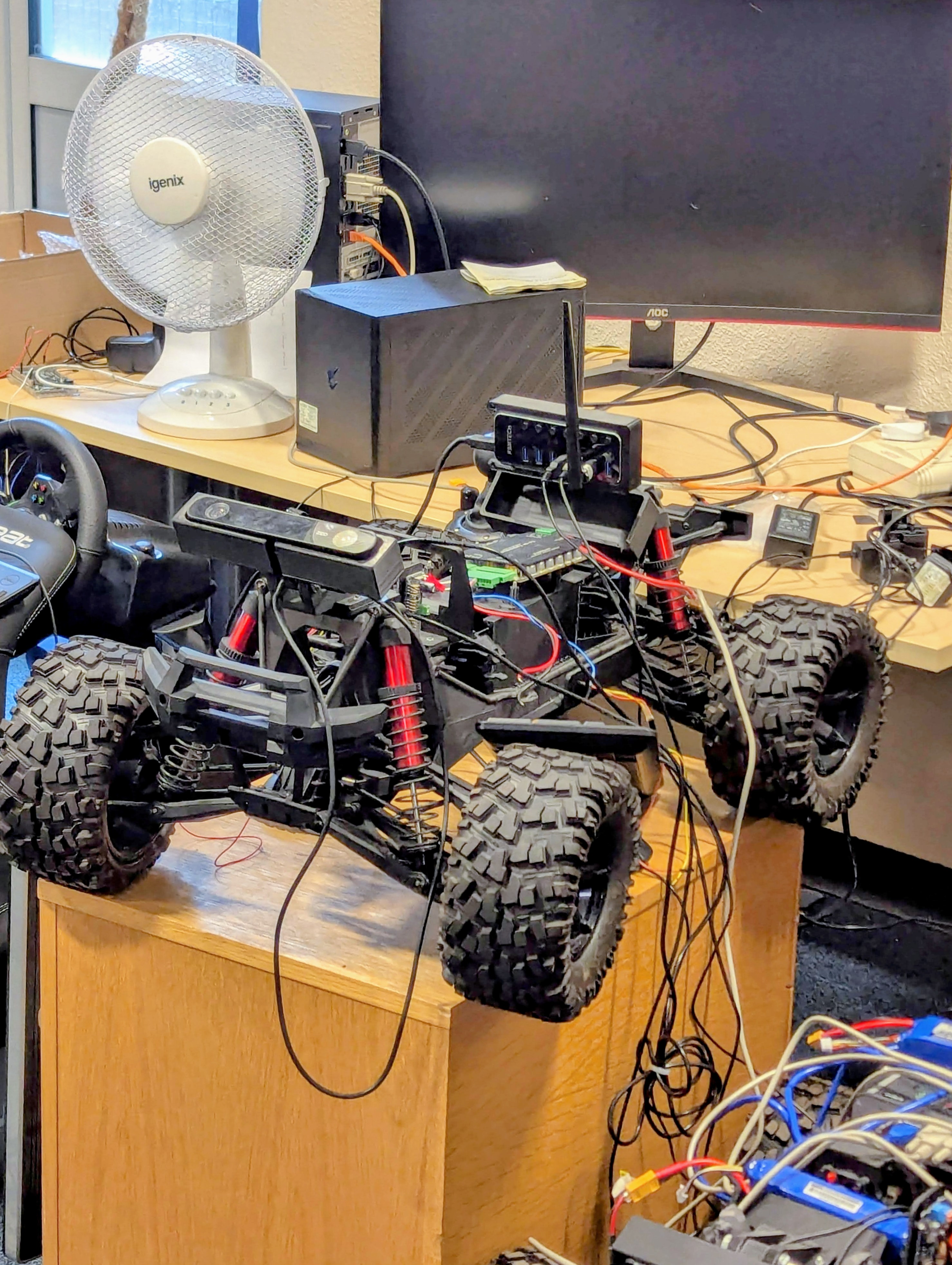
Autonomous RC Cars
Sensor integration and remote teleoperation through 4G.
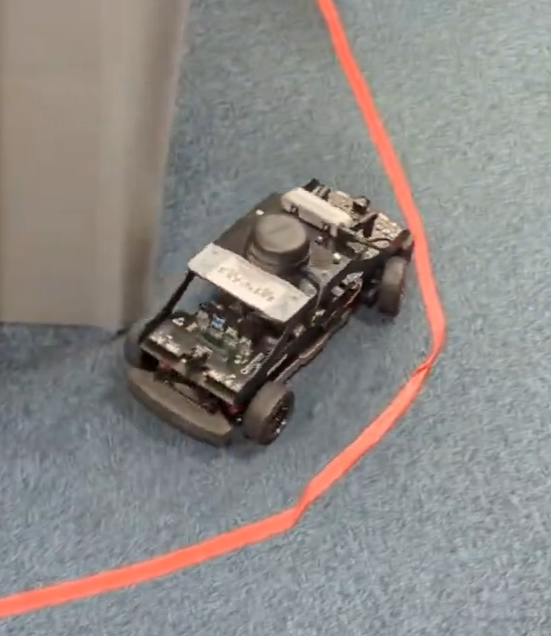
RC Lane Following
End-to-end vision-based lane following using GAIL and convolutional neural networks.
ClimateCode — OpenAI Hackathon
Fine-tuned LLMs for compute-optimised code generation.
Cyclopic
Contract robotics project architecting communications and networking systems for GPS-denied environments.
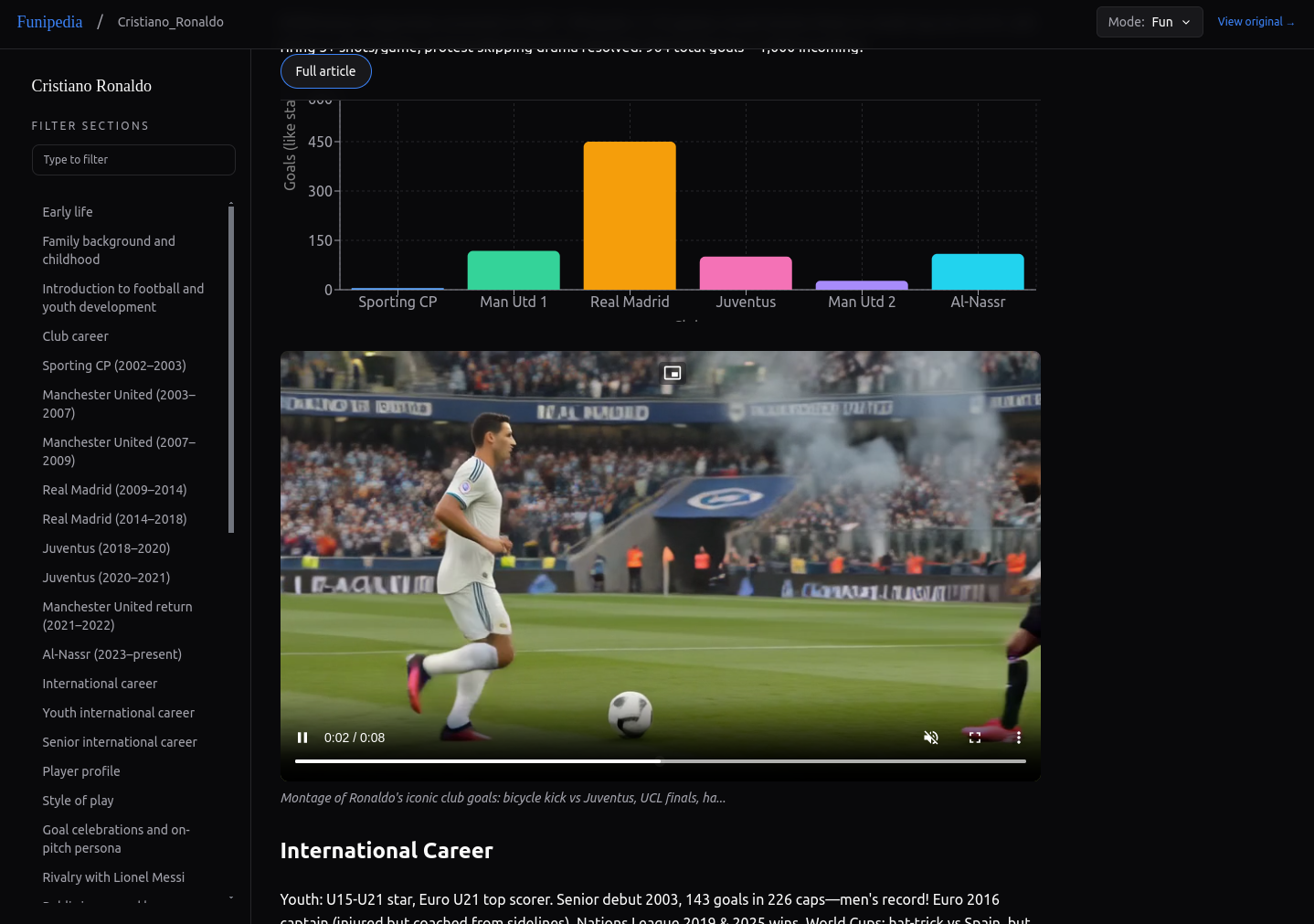
Funipedia
Fun Wikipedia-style article platform which injects LLM-generated code to produce interactive React components, images and videos. Grokathon 2026 honourable mention.
Facial Recognition System
Real-time face detection and recognition pipelines using computer vision.

Stock Price Prediction
BSc dissertation training an LSTM model for 14-day stock price forecasting with a web interface comparing against indicator-based strategies.

CTF Challenges
Treasurer of the InfoSec society. Organised and competed in security competitions.